PID Tuner Forum › Forums › PID Tuner Help › Step response questions
- This topic has 2 replies, 2 voices, and was last updated 3 months ago by
kpower.
-
AuthorPosts
-
April 24, 2024 at 12:25 pm #153
kpower
ParticipantHello,
Wonderful software package, appreciate the free availability. I would have included a link for you, but am getting the following error:
Failed to fetch existing project.
Error code: XMLHttpRequest failed: “Unable to connect to the Parse API”I think it would be easy enough to explain my issue.
Modeling a 2nd order plant with the K,w,z values exactly like what PID tuner shows. Our plant models are in complete agreement (I am using GNU Octave).
Octave can also use the standard model PID, so I am fairly certain our controllers are in agreement. When I close the loop and run step tests, Octave and PIDtuner are providing the same output response on PI controllers. So far so good.
However, when I begin to add significant amounts of D to the control, the step responses differ. No D filters are modeled. Is this a problem with my setup, with Octave, or with PIDtuner?
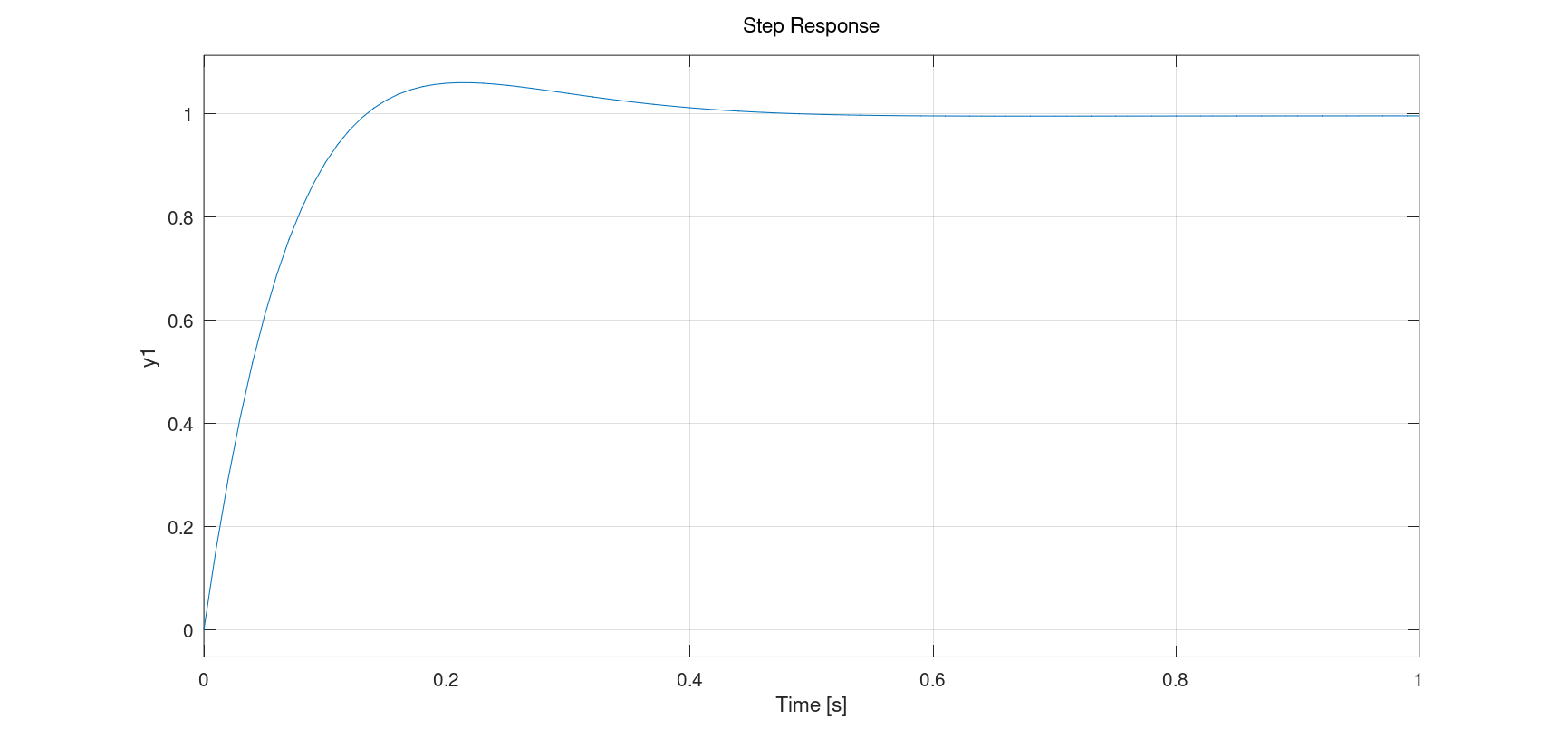
All pertinent output from Octave is shown below, and I have attached a screen shot of the step response output. It would be simple to force PID tuner to these same values for the plant and PID.
K = 3.7600
w = 1.2078
z = 2.3056Transfer function ‘Plant’ from input ‘u1’ to output …
5.485
y1: ———————
s^2 + 5.569 s + 1.459Continuous-time model.
P = 30
Ti = 10
Td = 0.1000Transfer function ‘Control’ from input ‘u1’ to output …
30 s^2 + 300 s + 30
y1: ——————-
10 sContinuous-time model.
Transfer function ‘ClosedLoop’ from input ‘u1’ to output …
164.5 s^2 + 1645 s + 164.5
y1: ———————————–
10 s^3 + 220.2 s^2 + 1660 s + 164.5Continuous-time model.
 April 24, 2024 at 3:37 pm #154
April 24, 2024 at 3:37 pm #154pidtuner
KeymasterHi,
Thanks for notifying the Error code. That needs fixing indeed.
Regarding the difference between simulations, maybe this other question is the cause:
Basically, the PID implementation applied the D gain on the measurement, not on the error.April 24, 2024 at 9:19 pm #155ParticipantPerfect, that was it.
Modified the Octave model around for DoPV, and both tools are in agreement.
Thank you!
-
AuthorPosts
- You must be logged in to reply to this topic.