PID Tuner Forum › Forums › PID Tuner Help › Weird results
Tagged: Correctness of simulation
- This topic has 4 replies, 2 voices, and was last updated 3 years, 4 months ago by
kortenbach.
-
AuthorPosts
-
March 13, 2021 at 6:43 pm #75
kortenbach
ParticipantI’m experiencing some weird results from the simulation in relation to the real world. My data is in https://pidtuner.com/#/9lp8u4InrA.
Just for fun I tried to use Ziegler Nichols “Ultimate Gain” tuning method. Ultimate gain was at 21 @ period of 100s. After entering the PID parameters accordingly. The simulation told me things would be *bad*. That’s weird… Moreover, when I enter the Kc, Ti and Td from my, real world, controller the sim also tells be that it will be very unstable.
Changing the model introduces some difference in output and simulated output, but the calculated Kp, Ti and Td differ quite a bit. I would expect them to be roughly in the same ballpark. but they aren’t for some reason.
How sure are you that the simulation is correct? Did you compare it with real world situations?
P.S. In my data temperature is in K and Time is in s
March 15, 2021 at 9:53 am #77pidtuner
KeymasterHi, yes all time must be in seconds. Your input step data is definitively weird.
It seems you are not introducing an “clean” open loop step response of your process. This can clearly be seen because when your input is zero, your process is responding to something, let’s call it “unmeasured disturbance”
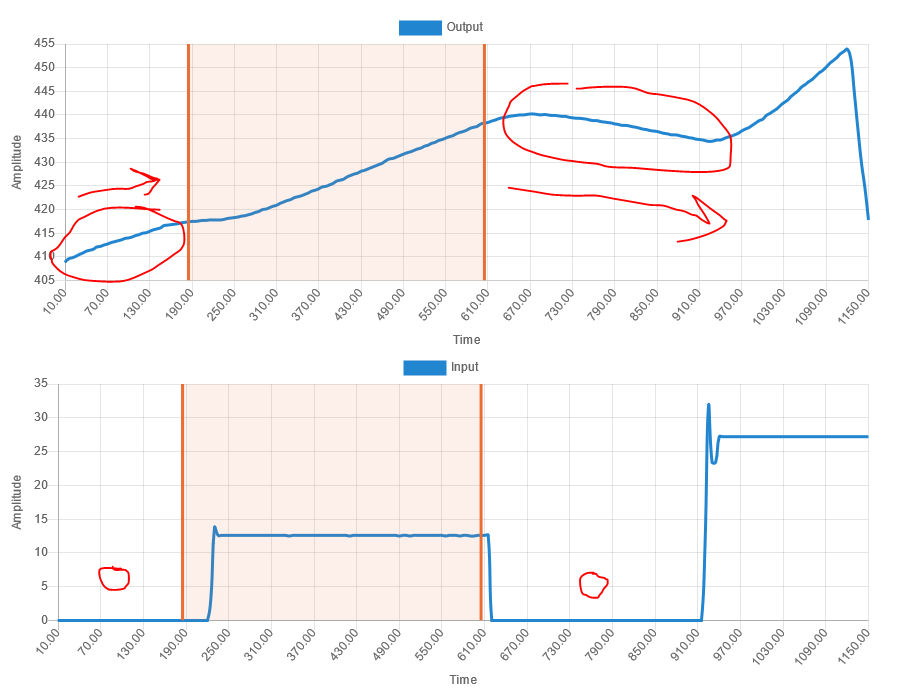
What is even more worrying is that before the first step, the unmeasured disturbance seem to be affecting the process with a positive slope, and after the first step, it is affecting with a negative slope. So it not a disturbance that can be de-trended.
To get a good model of your process, you need to record a “clean” open loop step (without external disturbances). If there are external forces driving your system, it will be very hard to obtain an accurate description on how your process input drives the process output.
That being said, this does not mean the pidtuner will not be useful to you. What it means is that you should be careful and realize that the simulation given by it will not be an accurate one, because of the unclean data you gave to it.
If you have no way of performing a “clean” open loop step response experiment, I would use this data, but then de-tune the gains given by the pidtuner (slider to the left) and use it as a starting point for tuning. Then increase the performance slowly until satisfactory results are obtained. This is the price of uncertainty in control.
March 15, 2021 at 10:38 am #80ParticipantThe proces is a gas flame that is heating a metal drum in a flow of air. Minimal flame heats up at bit. Had to wait for stability in beginning. Then turn gas flame up. When gas flame was turned down again the airflow cooled down the drum again because it was hotter that before.
The tuning results from the software and the real world are, miles apart for some reason while the model seems to follow the measurements pretty well…
I tried all available models but could not get even close to the real world PID settings that gave me reasonable results…
Thanks again for making this. I think it will be(come) useful to many people!
March 15, 2021 at 11:40 am #81KeymasterApart from minimizing disturbances in the data, and making sure time is seconds, also make sure that the data must be the exact same values that go into the PID (process output) and out of the PID (process input).
I cannot stress this more, it is a very common mistake when using the tool, the data must be exactly what would come in and out of the PID block (of course in open-loop PID is disabled, but this is just to illustrate which are the signals that are needed).
Have a good tuning!
March 19, 2021 at 11:40 am #85ParticipantAn important thing it forgot to mention is that it is a batch process. It is a drum that rotates on top of a gas flame. The drum is then filled with product and the gas flame starts to heat up the drum. After about 15 min the product is dropped from the drum and the process is repeated.
-
AuthorPosts
- You must be logged in to reply to this topic.