PID Tuner Forum › Forums › General PID Discussion › Oscillation after tuning
- This topic has 2 replies, 2 voices, and was last updated 1 month ago by
twadek.
-
AuthorPosts
-
May 29, 2024 at 10:14 pm #156
twadek
ParticipantHello,
I have had great results tuning my BLDC control system using one of my two drive systems. I am experiencing difficulty with the other; it has some consistent oscillation problems.
The system seems to fit a first order approximation very well:
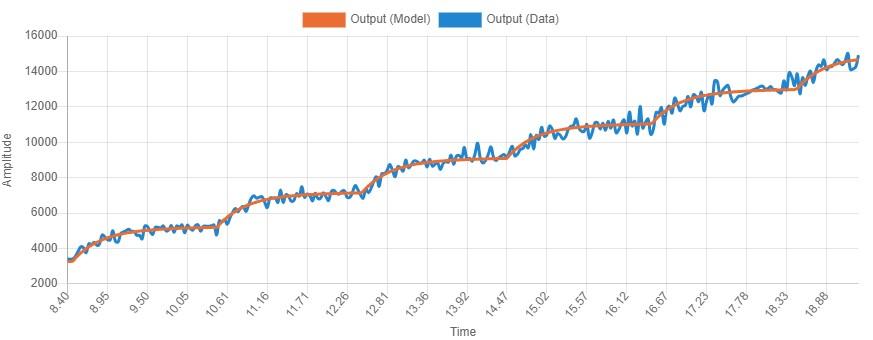
However, even after using the gain values from the most conservative tuning, there are moderate oscillations during free spin and severe oscillations under loading.
Because this is the same control algorithm and ramp/limit parameters as the first system, I’m having trouble understanding why this could be. My gut says that there is just too much gain in the system, but I’m not sure how to scale it back even further without affecting the relationship between Kp and Ki determined by the model.
I know this is probably not a pidtuner problem, but any help would be greatly appreciated.
May 30, 2024 at 7:33 am #157pidtuner
KeymasterIf you are experiencing oscillations, either your control action is too aggressive or your system has to much phase lag. Both conditions are equivalent, if your system has too much phase lag (delay), you are restricted on how aggressive the control can be. Another cause could be hat you are not sampling fast enough.
Without more details about your system it is hard to diagnose this. If both systems are exactly equal in terms of, sampling time, control algorithm, etc. Most likely the issue is hardware, maybe one of your drives is experiencing more friction, which has similar effects as phase lag.
If you want more help, you need to share as much data as possible, one screenshot is not going to cut it I am afraid.
June 25, 2024 at 5:31 pm #161ParticipantThe algorithm and sampling time are equivalent, but the second system operates at much higher speed. There is definitely more phase delay, but my thought was that the model would account for that delay in the model.
If anything, the actual system has less delay than the training data shows, because I am removing a logging mechanism that adds a slight delay inherently. I would think that this would mean that the model would create a slightly overdamped system.
-
AuthorPosts
- You must be logged in to reply to this topic.