PID Tuner Forum › Forums › PID Tuner Help › Weird results › Reply To: Weird results
Hi, yes all time must be in seconds. Your input step data is definitively weird.
It seems you are not introducing an “clean” open loop step response of your process. This can clearly be seen because when your input is zero, your process is responding to something, let’s call it “unmeasured disturbance”
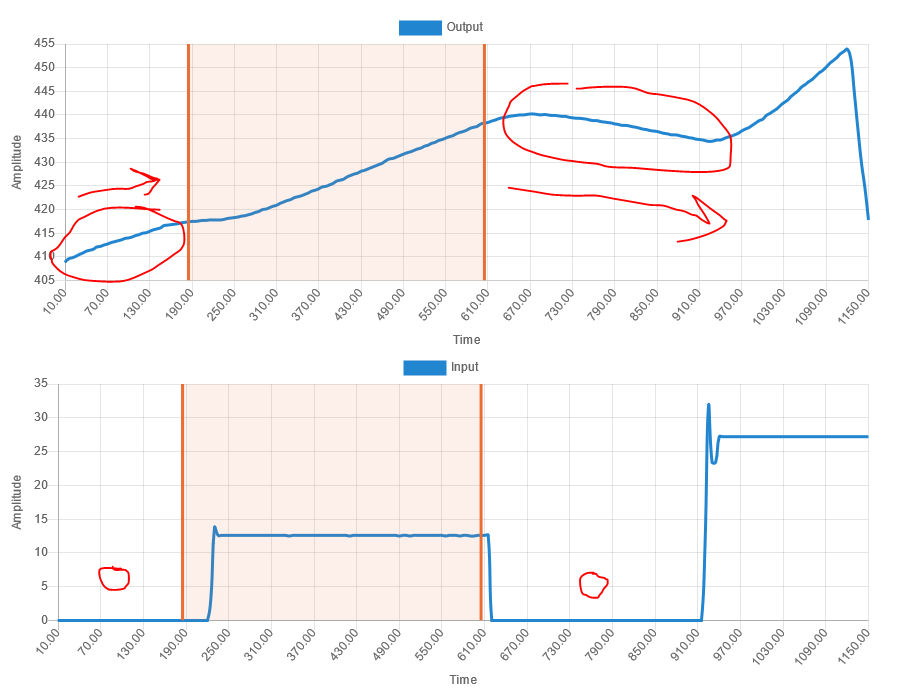
What is even more worrying is that before the first step, the unmeasured disturbance seem to be affecting the process with a positive slope, and after the first step, it is affecting with a negative slope. So it not a disturbance that can be de-trended.
To get a good model of your process, you need to record a “clean” open loop step (without external disturbances). If there are external forces driving your system, it will be very hard to obtain an accurate description on how your process input drives the process output.
That being said, this does not mean the pidtuner will not be useful to you. What it means is that you should be careful and realize that the simulation given by it will not be an accurate one, because of the unclean data you gave to it.
If you have no way of performing a “clean” open loop step response experiment, I would use this data, but then de-tune the gains given by the pidtuner (slider to the left) and use it as a starting point for tuning. Then increase the performance slowly until satisfactory results are obtained. This is the price of uncertainty in control.