PID Tuner Forum › Forums › General PID Discussion › Differential drive PID tuning › Reply To: Differential drive PID tuning
Hi,
The input to the pidtuner should be the “TurnSpeed” and the output should be the “GPS Heading”. I tried to import your data to the pidtuner using the “Loop Timer” as the time, but divided by 1000 to get the seconds.
Sadly your data does not contain clean manual steps on the input (TurnSpeed). These should be performed in open-loop (PID turned off). Some steps up and down while recording the output (GPD Heading).
Still the pidtuner gave somewhat of a match, see the following link:
https://pidtuner.com/#/0eDJOt49JM
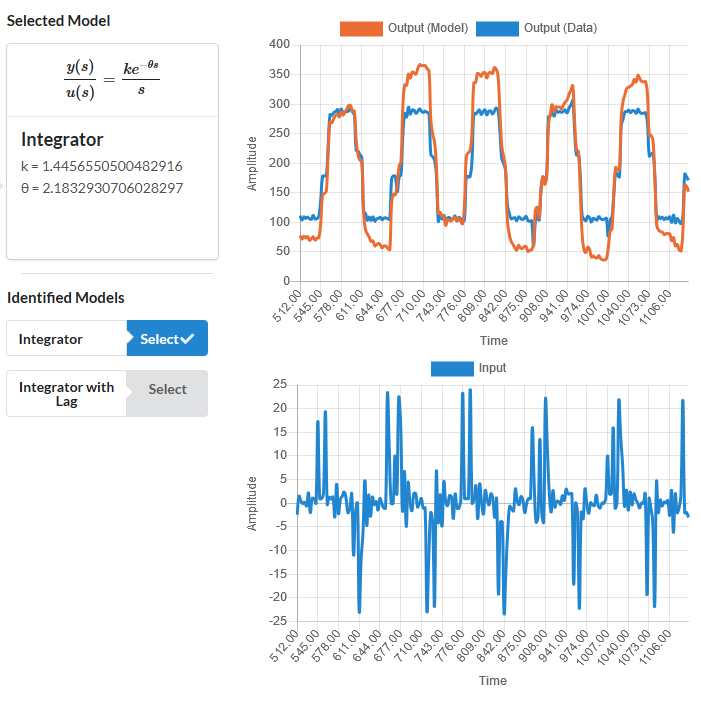
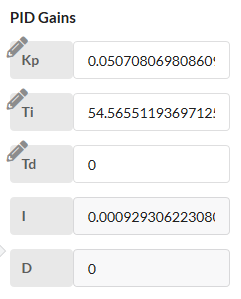
I would try some conservative PID gains first like the ones shown in the link, then if it works, move the slider right to mak the PID gains gradually more agressive.
Still the bets thing to do would be to repeat the experiment, providing some clean steps on the “TurnSpeed”.