PID Tuner Forum › Forums › PID Tuner Help › Integrating process
- This topic has 4 replies, 2 voices, and was last updated 1 month ago by
panzerschpecht.
-
AuthorPosts
-
September 9, 2024 at 10:24 am #162
panzerschpecht
ParticipantHello!
I have an integrating process so I did collect data as described in FAQ: made a series of step changes. But what next? Which part of dataset should I use? All of it or some particular transition from one state to another? If so, which one? I am feeling a bit confused here.
September 9, 2024 at 4:39 pm #163pidtuner
KeymasterHi,
Depending on the quality of your test data, it might be enough to just use one transition of your data set,
Would it be possible for you to share your process data in order to give you more detailed help?September 10, 2024 at 8:09 am #164ParticipantSomething like this: https://pidtuner.com/#/wl5wUVWt8i
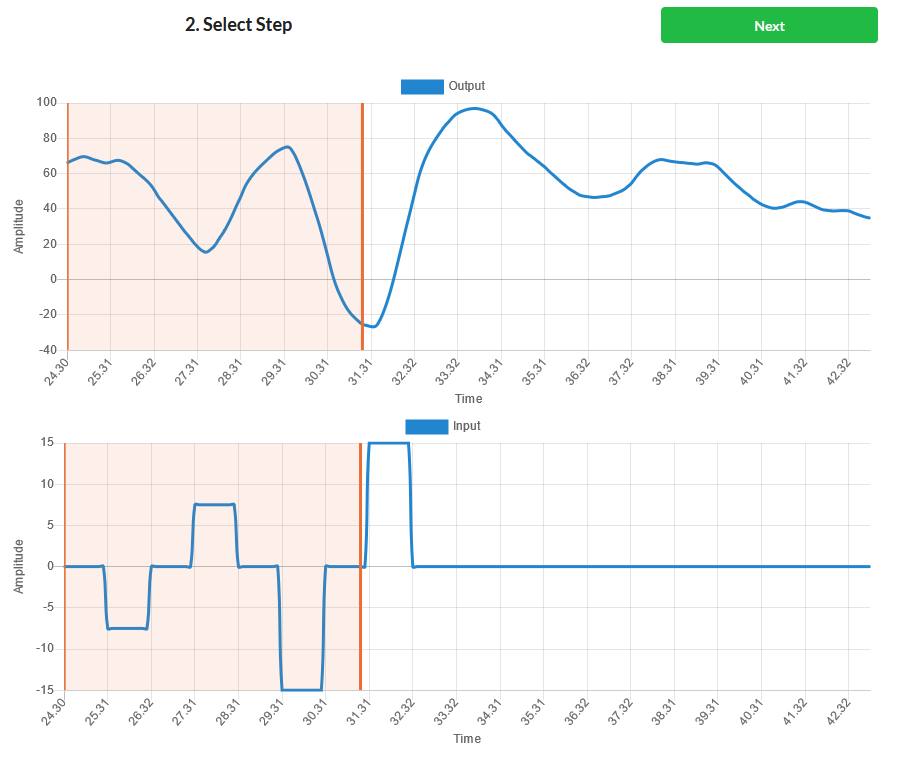
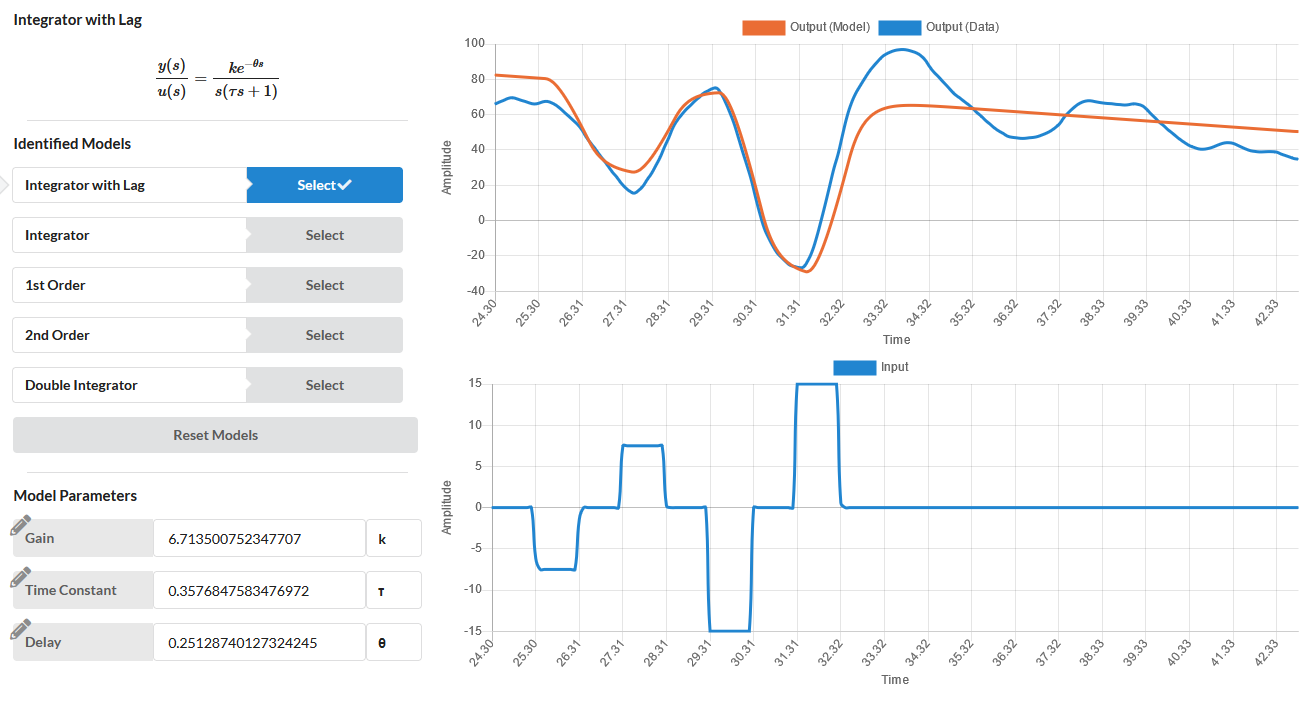
September 10, 2024 at 5:00 pm #165KeymasterI just selected a region of your data that makes a model that “could” work.
The “could” is in quotes because your test data is quite “dirty”, meaning that you have a lot of disturbances going on while you are making the test.In order to get a proper model (and better PID tuning) try to do the test without such disturbances. The disturbances are clearly observable at the end of your est where you do not have any movements on the process input, yet the process output displays fluctuations that are not correlated to the input. These are disturbances, you must identify them and try to reduce them at least temporarily as much as possible for the test.
 September 12, 2024 at 3:40 pm #166Participant
September 12, 2024 at 3:40 pm #166ParticipantThanks a lot! It just became a bit clearer 🙂
-
AuthorPosts
- You must be logged in to reply to this topic.